






arrow_upward
ANSER, 50 días en órbita
- 12/5/23 3:04 PM
- Santiago Rodriguez Bustabad
El pasado día 26 de noviembre, ANSER cumplió sus primeros 50 días en órbita. Una vez asimilado el impacto del no-despliegue del satélite ANSER-Leader, las operaciones sobre ANSER se han centrado en ejecutar de forma conjunta la puesta en marcha de los dos satélites follower. Una vez completada la puesta en servicio del Sistema, ANSER desplegará alas e iniciará un descenso desde 570 km de altura para alcanzar su órbita nominal de operación a 500km. Hasta entonces, toca afinar y depurar la operación de los distintos subsistemas, un proceso incremental y minucioso, es lo que se conoce como la commissioning del clúster.
Las primeras horas en órbita de ANSER sirvieron para comprobar que los subsistemas básicos se encontraban en perfecto estado de salud, el sistema de generación y almacenamiento de energía (paneles y baterías), de comunicaciones con tierra (TTC), computador de a bordo y sistema de almacenamiento de datos funcionaron perfectamente desde el primer contacto. También se certificó el excelente comportamiento del Centro de Control de Misión localizado en el CEIT, recibiendo de forma regular la telemetría y comandando simultáneamente los dos satélites a través de sus dos antenas UHF a una velocidad de transmisión de 50kbps.

Figura 1 Evolución de la temperatura de batería de FLW2 en función de los modos de control del ADCS
Además de la telemetría de housekeeping (temperaturas, corrientes, voltajes, etc.), el software embarcado de ANSER, mantiene y registra a modo de relato cada operación o incidencia que se produce a bordo durante su ejecución, a este canal de telemetría se le conoce como ERDP y permite reproducir en tierra todo lo sucedido durante las últimas órbitas. A través de ERDP, se identificaron inmediatamente dos incidencias relacionadas con el ADCS y la actuación del FDIR. Por un lado, durante pase LEOP, Follower-1 detectó un error en el power-up del ADCS, OBSW intentaba ponerlo en marcha de forma periódica y sin éxito. Por su parte Follower-2, aunque arrancó sin problema su ADCS, detectaba un error esporádico en la operación del magnetómetro y por tanto el FDIR deshabilitaba la operación del mismo. Ambas anomalías fueron notificadas a tierra mientras se transitaba a modo seguro el satélite para ser resueltas por el equipo responsable del ADCS. Esta situación se forzó y reprodujo fielmente en el modelo de satélite backup de tierra y la solución, después de ser validada sobre ese mismo modelo, fue subida como actualización de software a ambos satélites. Los dos follower comenzaron por fin su operación nominal.
Una vez certificado que todos los subsistemas de a bordo funcionan de forma nominal, se procede a realizar de forma simultánea un minucioso commissioning del ADCS de los dos satélites. La primera acción es frenar su velocidad de giro activando el modo detumbling, primero con actuaciones cortas de 10’ para verificar que se mantiene el nivel de carga de baterías y luego dejándolo permanentemente activo en modo “damped spin“.
La figura siguiente muestra el frenado de Follower-2 que fue programado para ejecutarse a las 20:55:00 UTC del 2023-11-13.

Figura 2 Gráfica que muestra las velocidades de giro antes y después de frenar Follower-2
Para continuar la validación del ADCS, resulta necesario desplegar el magnetómetro de 3 ejes y separarlo del cuerpo del satélite unos 12cm para así minimizar la contaminación magnética generada por el propio satélite. Desplegarlo implica rotarlo 90º respecto al eje Y (perpendicular al plano orbital) con lo que se intercambian los valores del eje X y Z. Para facilitar el proceso, antes de desplegar, es necesario situar los satélites en modo Y-Thomson. Significa que se frena completamente el giro en torno a X y Z y, usando magnetopares, los satélites mantienen un giro residual alrededor de su eje Y de 10º por segundo.

Figura 3 y 4. Ejes de referencia de ANSER y Mangetómetro en posición desplegada

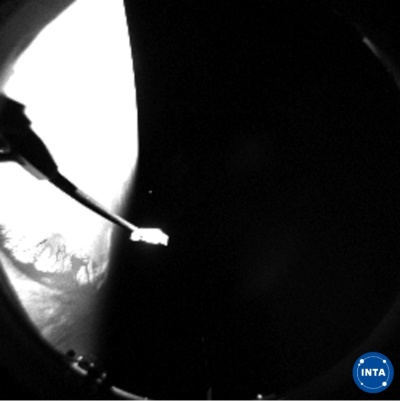
Figuras 5 y 6. Imagen tomada en órbita por FLW2 antes de desplegar MGM e
Imagen tomada en órbita por FLW2 después de desplegar MGM
Las figuras 5 y 6 muestran sendas imágenes tomadas con la cámara de nadir de Follower-2 que confirman el correcto despliegue de su magnetómetro.
Una vez desplegados los magnetómetros, con los datos de Telemetría descargados, se procede a su calibración en Tierra, mejorando así claramente el control de la actitud de los dos satélites. El resultado es realmente satisfactorio y se puede ver en la figura 6. En color rojo se muestra el valor de campo magnético antes y después de la calibración. En el segundo caso, ya el sensor calibrado, la medida es prácticamente igual al valor modelado a partir del TLE que define la órbita.

Figura 7 Resultado de la calibración del MGM de FLW1
Manteniendo los satélites girando alrededor de su eje Y (Y-Thomson) se pone en marcha la validación de la rueda de inercia del eje Y, para ello se comanda una velocidad de giro capaz de absorber el movimiento del satélite dejándolo durante unos minutos totalmente parado.
Con el objetivo de llegar al siguiente paso de la commissioning (poder conseguir un control en Y-Momentum) por la tarde del miércoles 29 de noviembre (entre las 16:00:00 UTC y las 17:40:00 UTC) se ejecuta la prueba del estimador "RKF con estimación de ángulo de pitch" durante una órbita y se comprueba que funciona correctamente.
Todas estas comprobaciones, paso a paso, han permitido por fin colocar los dos satélites en modo Y-Momentum, esto significa que se ha frenado el giro alrededor del eje Y hasta fijarlo en una revolución por órbita, manteniendo un apuntamiento permanente de su eje Z a nadir. Es decir, las dos cámaras CINCLUS ya “miran” continuamente a Tierra con una precisión de apuntamiento mejor que 1º.
Los siguientes pasos a dar, dentro de este proceso de puesta en servicio, implicarán la validación de las ruedas de inercia X y Z para incorporarlas al algoritmo de control en 3 ejes. A continuación, se probarán las cámaras de horizonte, solar y star-tracker que serán incorporadas al algoritmo de estimación a fin de conseguir los 0.05º de precisión de apuntamiento nominal. Ya en esta situación se desplegarán los flaps de control de órbita (FFC) para iniciar el descenso hasta alcanzar los 500 km de altura.

Figura 8 Angulo respecto a nadir con el satélite en modo Y-Momentum
Finalmente, en paralelo con las actividades de puesta en servicio del sistema, se ha solicitado y recibido autorización por parte del programa de IOD/IOV de la Comisión Europea para el lanzamiento de un nuevo satélite leader (ANSER LEADER-S) a lo largo del año 2024 con el ambicioso objetivo de restablecer la capacidad de liderazgo en el clúster ANSER, un rol no imprescindible, pero sin duda beneficioso. El satélite Leader-S está ya siendo ensamblado y estará listo para aceptación a final del mes de febrero.
Santiago Rodríguez Bustabad