
arrow_upward
Arquitectura HW
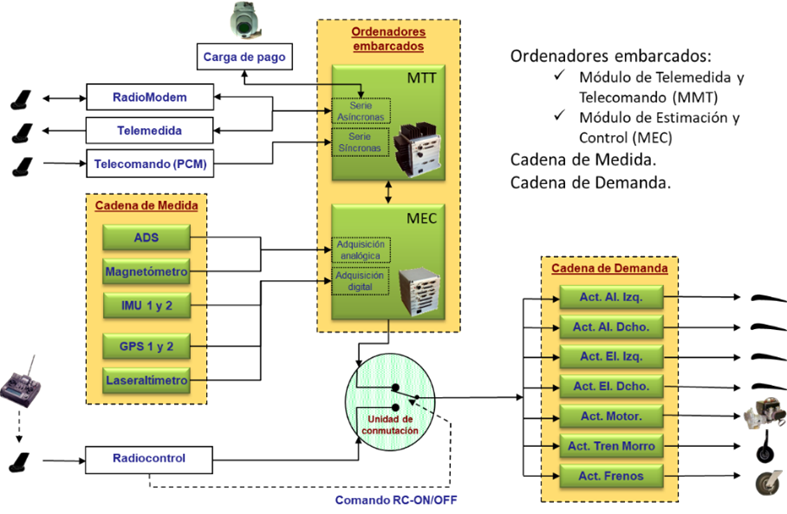
La arquitectura hardware del SICANT sigue una estructura que ha ido evolucionando desde las primeras versiones de los autopilotos y sistemas de control del Área de Mecánica de Vuelo hasta su versión actual. En ella podemos encontrar tres partes principales diferenciadas:
- Cadena de medida: compuesta por sensores y sistemas de adquisición de variables y datos de vuelo.
- Ordenadores embarcados: compuesto por el MEC (Módulo de Estimación y Control) y por el MTT (Módulo de Telecomando y Telemedida)
- Cadena de demanda: compuesta por los actuadores que posibilitan el control del vuelo de la aeronave.
Existen además una serie de subsistemas auxiliares a la operación, como los elementos dedicados a la comunicación con la estación de tierra o la carga de pago entre otros. El SICANT control y coordina todos ellos en función de la operación y la misión que se vaya a llevar a cabo con el RPAS.