
Arquitectura SW
La arquitectura software del SICANT se puede definir como la estructura de su código lógico, es decir, cómo están organizados los programas que consiguen que el SICANT haga lo que hace. Si bien el hardware posibilita el control real sobre la aeronave y la adquisición de datos, sin una lógica de control y estimación, dicho control no sería posible.
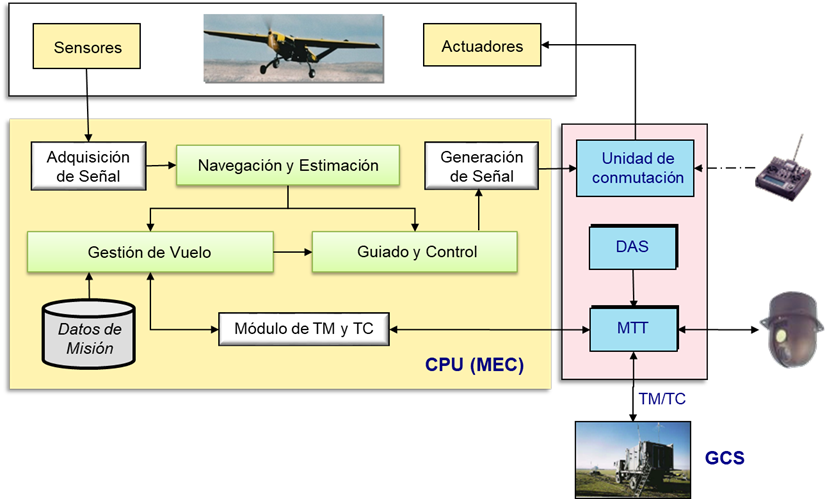
El software del SICANT funciona a diferentes niveles proporcionando no sólo un control a bajo nivel de la actitud de la aeronave, sino una completa gestión de la navegación y de la misión, a alto nivel, que aumenta las prestaciones del RPAS y facilita la tarea del piloto remoto. Todas estas actividades de control y estimación se llevan a cabo en el MEC (Módulo de Estimación y Control), que se comunica con el MTT (Módulo de Telecomando y Telemedida) para tareas relacionadas de comunicación con la estación de tierra.