






arrow_upward
Sen2Cor: visibilidad
- 10/11/17 13:53
- INTA Copernicus Relay
En la entrada de hoy volvemos a hablar de Sen2Cor, el software gratuito que facilita la ESA para la corrección atmosférica de Sentinel-2. En concreto, queremos hablar de unos de los parámetros que podemos modificar a la hora de lanzar la corrección atmosférica: la visibilidad.
Como ya hemos visto en otras entradas, la visibilidad es una manera de indicar el contenido en aerosoles de la atmósfera. Y el contenido en aerosoles determina la dispersión de la irradiancia entre el sol y la superficie, y entre esta y Sentinel-2. Por tanto, el valor escogido para la visibilidad afecta a los valores finales de reflectancia, en qué medida es lo que hemos intentado estudiar aquí.
El valor empleado por defecto por Sen2Cor son 40km, lo cual es una buena estimación para el interior de la Península Ibérica. Sin embargo, veamos qué ocurre al utilizar un valor inferior, como pueden ser 20km (que sabemos que es demasiado poco), y uno superior, como pueden ser 60km (que quizás está por encima de lo que cabría esperar, pero que no es un valor tan descabalado).
En las siguientes tablas podemos observar cuánto se desvían los valores de reflectancias para 20km de visibilidad (izquierda) y 60km (derecha), considerando la reflectancia con visibilidad de 40km como el valor correcto.
|
|
|
∆(Vis_40-Vis20)/Vis_40 % |
|
∆(Vis_40-Vis60)/Vis_40 % |
||||
|
|
λ |
Pin1 |
Pin2 |
Pin3 |
|
Pin1 |
Pin2 |
Pin3 |
|
|
490 |
80.55% |
-15.40% |
-6.11% |
|
-21.84% |
4.43% |
1.94% |
|
|
560 |
35.29% |
-13.72% |
-7.98% |
|
-9.56% |
4.03% |
2.50% |
|
|
665 |
65.34% |
-11.14% |
-9.45% |
|
-18.10% |
3.38% |
2.90% |
|
|
842 |
-5.89% |
-5.34% |
-6.21% |
|
1.86% |
1.68% |
1.95% |
Observando la tabla de la izquierda, de visibilidad 20km, vemos que todos los valores de reflectancia se van mucho comparados con el valor de 40km. Por otra parte, en la tabla de la derecha, de visibilidad 60km, los errores no son tan grandes (muchos por debajo del 3% y la mayoría por debajo del 5%), a excepción de para la vegetación. Esto se debe a que, lógicamente, en las superficies más oscuras, como la vegetación en las bandas visibles, los cambios en reflectancia al cambiar la visibilidad son proporcionalmente mayores. Desafortunadamente muchas superficies de interés tiene reflectancia baja.
Es importante ver que no se puede predecir fácilmente cuál sería el efecto de un error en la visibilidad sobre la reflectancia estimada en un píxel. Depende, en primer lugar, de si se trata de una superficie oscura o brillante. Pero también depende de la homogeneidad local de la imagen, ya que por el llamado efecto de adyacencia la señal recibida desde cierto píxel depende de la de sus vecinos. Este efecto aumenta al aumentar la dispersión atmosférica, pero es el patrón de reflectancia local el que determina cuánto. Los datos que os hemos presentado son solo unos ejemplos rápidos, que no pueden usarse como reglas generales pero sirven para ilustrar que la determinación correcta de la visibilidad es importante.
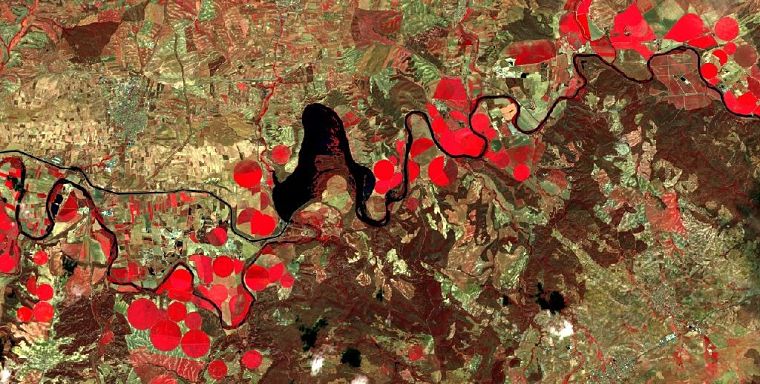
Imagen Sentinel-2 nivel L2A de Toledo, utilizada en estos cálculos.